AR HMD Guidance for Controlled Hand-Held 3D Acquisition
Published:
Presented at ISMAR 2019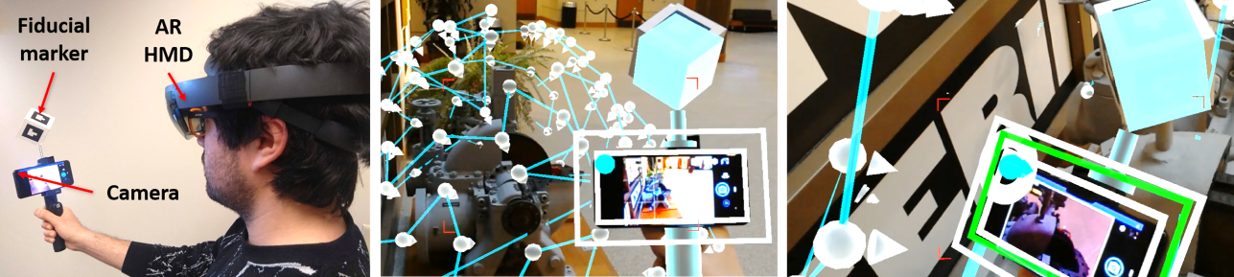

Published:
Presented at ISMAR 2019
Published:
A multi-year interdisciplinary research project to improve surgical performance in austere environments using augmented reality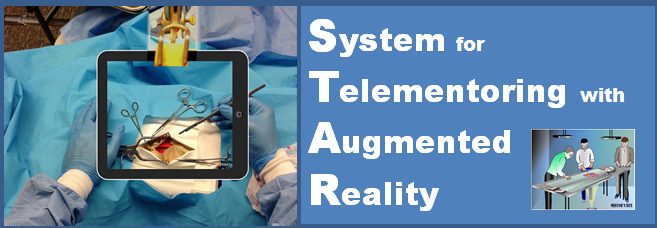
Published:
Final project for Purdue CS535
Published:
Cupola VR Viewer for Oculus Rift Head-Tracking in WebGL Virtual Environments
Published:
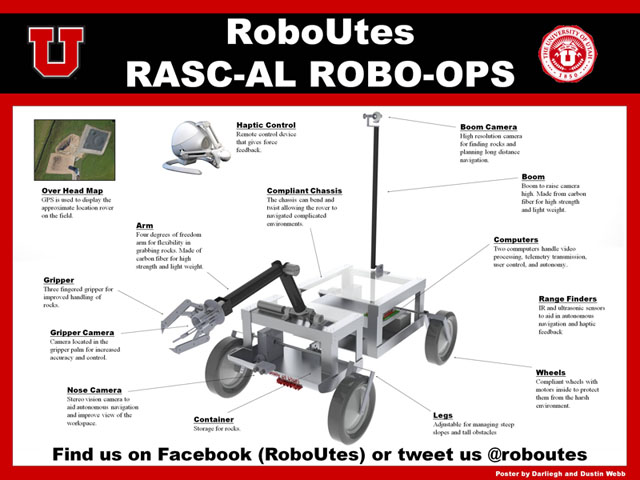
Mars rover competition